
Another Products


Description
XL430-W250-T

■ Basic Features
The DYNAMIXEL X-Series is a new line-up of high performance networked actuators.
The Dynamixel XL series adopts new features that allow 360 degrees control mode with its contactless magnetic encoder and hollow back case assembly structure. The XL series has the same mechanical structure as the XM430 and XH430 and is compatible with the respective models.
- Improved Torque, Compact Design
- Enhanced Durability and Expandability
- Hollow Back Case Minimizes Cable Stress (3-Way Wiring)
- Frames Directly Screwed onto the Case (No Nuts Needed)
- Energy Efficient with Improved Operation Time
■ Package Contents
| Description | Quantity | |
| DYNAMIXEL | XL430-W250-T | 1 |
| HORN | HN11-N101 (Pre-assembled) | 1 |
| CABLE | Robot Cable-X3P 180mm | 1 |
| BOLT/NUT | Bolt (M2.6*5) TAP | 5 |
| Bolt (M2*5) | 5 | |
| ETC | Spacer Ring | 5 |
■ H/W Specifications
| Model Name | XL430-W250-T | ||
| Weight (g) | 57.2 | ||
| Dimension (mm) | 28.5 x 46.5 x 34 | ||
| Gear Ratio | 258.5 : 1 | ||
| Operation Voltage (V) | 9.0 | 11.1 | 12.0 |
| Stall Torque (N.m) | 1.0 | 1.4 | 1.5 |
| Stall Current (A) | 1.0 | 1.3 | 1.4 |
| No Load Speed (RPM) | 47 | 57 | 61 |
| MCU | ST CORTEX-M3 (STM32F103C8 @ 72MHZ,32BIT) | ||
| Position Sensor | Contactless absolute encoder (12BIT,360°) by AMS | ||
| Motor | Cored | ||
| Resolution | 0.088° x 4,096 steps | ||
| Operating Range | Velocity Control Mode : Endless turn Position Control Mode : 360[deg] Extended Control Mode : ±256[rev] PWM Control Mode : Endless turn |
||
| Input Voltage (V) | 6.5~12.0V (Recommended voltage : 11.1V) | ||
| Operating Temperature | -5°C ~ 72°C | ||
| Command Signal | Digital Packet | ||
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit,1stop, No Parity) | ||
| Link (physical) | TTL Level Multi Drop Bus | ||
| ID | 253 ID (0~252) | ||
| Baud Rate | 9600 bps ~ 4.5 Mbps | ||
| Feedback | Position, Velocity, Load, Realtime tick, Trajectory, Temperature, Input Voltage, etc. | ||
| Material | Case : Engineering Plastic
Gear : Engineering Plastic |
||
| Standby current (mA) | 52 | ||
■ Default Settings
ID : 1
Baud Rate : 57600bps
*Please make necessary modifications to ID, baud rate, etc. after purchase.
■ Various Cabling Methods
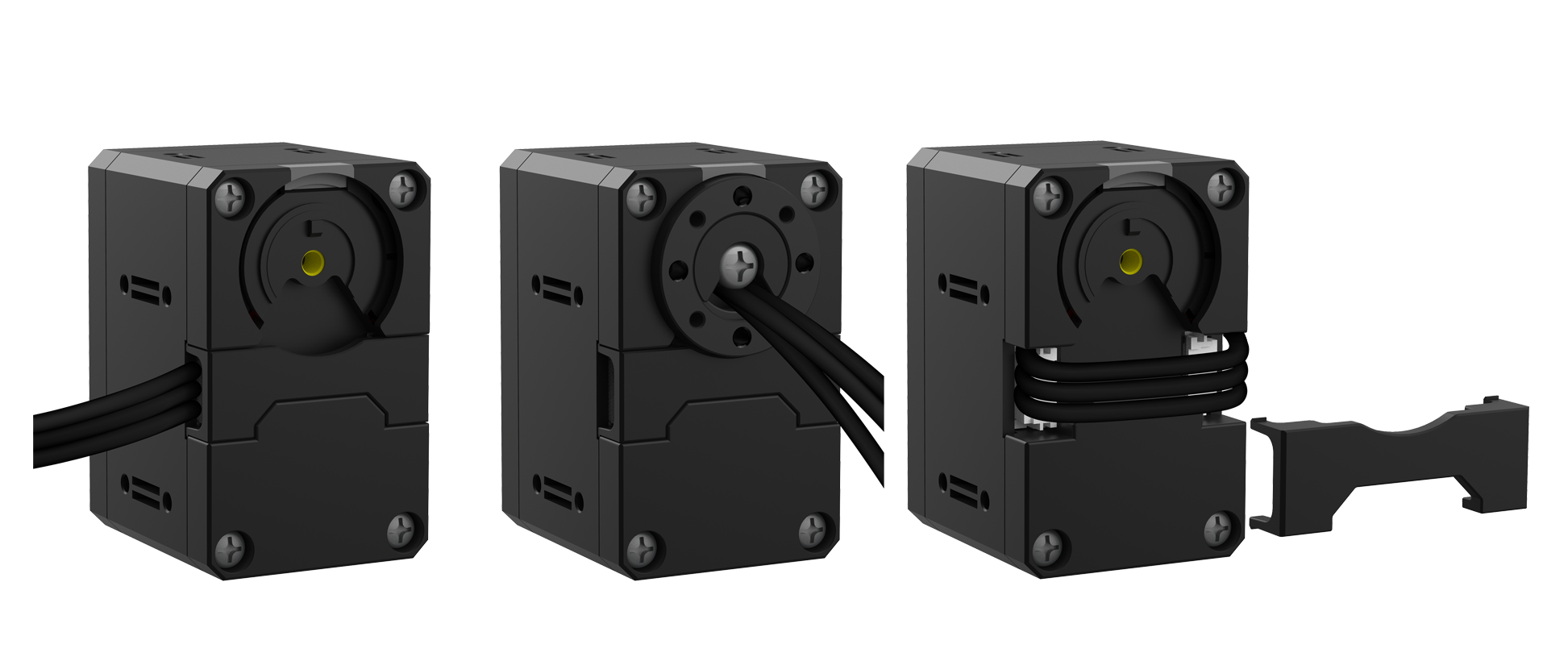
Caution – Cable Assembly through Hollow Case
Assemble the cable so that it does not tangle.
Do not assemble the back case with entangled cable. The entangled cable can be squashed by the case and cause communication error.
Do not assemble both cables through the hollow case. Be sure to use one hollow.
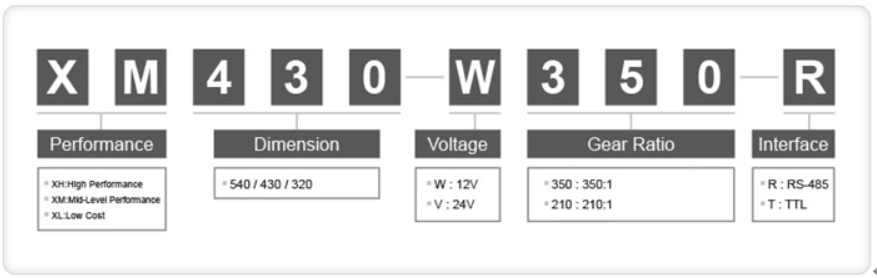
■ Model Numbering
■ Hyperlinks
Frame, Horn, Bearing Compatible Chart : Click Here
Controller Compatibility Chart : Click Here
Download Drawing : Click Here
Dynamixel SDK : Click Here
OpenCM IDE : Click Here
Software RoboPlus (R+) : Click Here
Link to e-Manual : Click Here
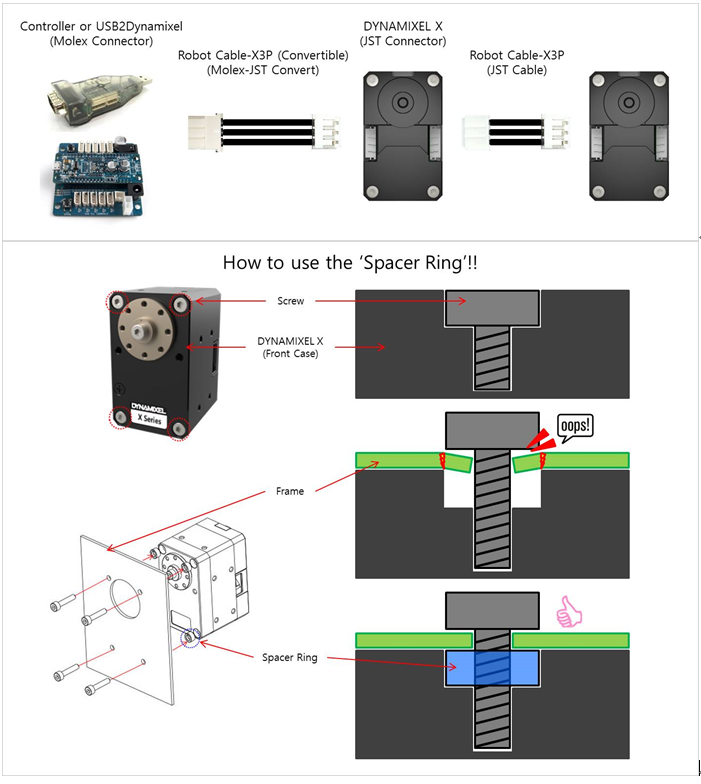
■ Caution
The DYNAMIXEL X-Series adopted a new gold-plated JST connector for secure and reliable communication.
For more information, please see the [DYNAMIXEL Connector Standard] page on the e-Manual.
To control DYNAMIXEL X-Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex Convertible Cable enclosed in the package.
However, the Molex-JST convertible cable is NOT included in the XL430 model.
Please purchase a convertible cable when using a controller and interface that supports the JST connector.
| Controller / Interface Board | Cable | Dynamixel X | ||
| Model | Supports Connectors : | Supports Connectors : | Communication | |
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable-X3P 180mm (Convertible) | JST-3P | TTL |
| USB2Dynamixel | ||||
| OpenCR1.0 | JST (3P, 4P) | Robot Cable -X3P (by length) | ||
| U2D2 | ||||
| OpenCM+485 Expansion Board | Molex (3P, 4P) | Robot Cable -X3P 180mm (Convertible) | JST-4P | RS-485 |
| USB2Dynamixel | ||||
| OpenCR1.0 | JST (3P, 4P) | Robot Cable -X3P (by length) | ||
| U2D2 | ||||
| Payment description | Original Price (HKD) | Total Price(HKD) | Services Fee(HKD) |
| PayPal | $490.00 | $512.93 | $22.93 |