




New products


G1-Universal humanoid robot – Edu Standard Version
Unitree G1-Universal humanoid robot - Edu Standard Version

ROBOTIS ENGINEER KIT 2
Robotis Engineer Kit2 require components form the Robotis Engineer Kit1 in order to assemble the example robots.

temi
A premium designed, video-oriented, autonomous personal AI assistant robot. temi can recognise and follow when requested, save preset locations, and navigate flawlessly around your home and office while connecting you to your friends, family and favorite web services.
All products

MX-106R
[902-0066-000] MX-106R **Caution – MX-106R supports RS-485 communication. – Recommended voltage of MX-106 is different with that of former EX-106+ – Operating Voltage : 10~14.8V (Recommended Voltage: 12V) DESCRIPTION: DYNAMIXEL is a robot exclusive smart actuator with fully integrated DC Motor + Reduction Gearhead + Controller + Driver +...
THORMANG3
THORMANG3 requires 12 weeks of lead time upon order. Please contact us at info@robotics.com.hk for pricing information


ROBOTIS Premium
** PRECAUTION ** DO NOT USE LIQUID TYPE LOCTITE/FIXATION GLUE FOR THIS PRODUCT BECAUSE IT WILL DAMAGE YOUR FRAMES. OUR SUGGESTION, USE LOCTITE 248 OR 268! USB2DYNAMIXEL IS NO LONGER INCLUDED!

L54-30-S500-R
Requires 4 weeks of lead time upon order. [902-0106-000] L54-30-S500-R Characteristics – DYNAMIXEL Pro is an integrated actuator composedof a gear reduction system, controller, driver, and network for constructing modular robots. – A detachable cycloidal gear reduction box. – Position, speed, and current control using an algorithm. –...

H42-20-S300-R
Requires 4 weeks of lead time upon order. [902-0081-000] PRO H42-20-S300-R Characteristics – DYNAMIXEL Pro is an integrated actuator composedof a gear reduction system, controller, driver, and network for constructingmodular robots. – A detachable cycloidal gear reduction box. – Position, speed, and current control using an algorithm. – Torque control using...




i90
Wireless (WiFi 802.11g) Robot Core Development Platform with High Resolution Pan-Tilt-Zoom Camera, Color Video Display and Software SDK This ready to use mobile robot platform is designed for researchers developing advanced robot applications such as remote monitoring, telepresence and autonomous navigation/patrol. Mechanics The i90 is the result of extensive...

Jaguar V6 with Arm
Jaguar V6 with Manipulator Arm Mobile Robotic Platform is designed for indoor and outdoor applications requiring robust maneuverability, terrain maneuverability and object manipulation. It comes with four articulated arms and is fully wirelessly 802.11N connected. It integrates outdoor GPS and 9 DOF IMU (Gyro/Accelerometer/ Compass) for autonomous navigation. Jaguar V6...

XH430-W350-T
[902-0126-000] XH430-W350-T ■ Basic Features The DYNAMIXEL X-Series is a new line-up of high performance networked actuators. For more detailed information, please visit the DYNAMIXEL X-Series Product Information page. • Improved Torque, Compact Design • Enhanced Durability and Expandability • Hollow Back Case Minimizes Cable Stress (3-Way Wiring) • Frames Directly Screwed onto the Case (No...


L54-50-S290-R
Requires 4 weeks of lead time upon order.
[902-0080-000] L54-50-S290-R
Characteristics
- DYNAMIXEL Pro is an integrated actuator composedof a gear reduction system, controller,
driver, and network for constructing modular robots.
- A detachable cycloidal gear reduction box.
- Position, speed, and current control using an algorithm.
- Torque control using current sensor.
- PID control is used to sense position.
- Resolution: Max 207,720 (steps/1 full rotation)
Components
| Components | Quantity | |
| DYNAMIXEL Pro | L54-50-S290-R | 1 |
| Cable | 4P Cable 600MM | 2 |
| 2P External Power Connector 600MM | 1 | |
| Bolt | Wrench Bolt (WB M3*8) | 20 |
Specifications
| Model Number | L54-50-S290-R | |
| Weight | 0.662kg (23.1oz) | |
| Size | 54x54x108(mm)
2.13x.2.13x4.25(in) |
|
| Rated voltage | 24 V | |
| No load speed | 26 RPM | |
| No load current | 1.05 A | |
| Continuous operation | Speed | 22.1 RPM |
| Torque | 4.8 Nm (680 ozf.in) | |
| Current | 1.9 A | |
| Resolution | 207,720 Steps/turn | |
| Gear ratio | 289:1 | |
| Backlash | 4.6 arcmin | |
| Interface | RS-485 | |
| Operating temperature | 5~55℃ | |
Default Settings
- ID: 1
- Baud Rate: 1 (57600bps)
(Please make necessary modifications, suchas the ID, baud rate, etc…, after the purchase.)
Caution
- L54-50-S290-R supports RS-485 communication.
- L54-50-S290-R has a Straight type reduction gear system.
- Caution: The operational voltage is different from other DYNAMIXEL series.
(Operational voltage: 24V)
■ Hyperlinks
Frame, Idler Compatible Chart : Click Here
Download Drawing : Click Here
DXL SDK 3.0 for Windows/Linux (Github): Click Here
OpenCM IDE : Click Here
Link to e-Manual : Click Here

OpenCR1.0
[903-0257-000] OpenCR1.0 ■ Basic Features OpenCR1.0 (Open-source Control module for ROS) is an open source robot controller embedded with a powerful MCU from the ARM Cortex-M7 line-up. The hardware, software, schematics, PCB Gerber, BOM, and firmware source codes of the OpenCR1.0, the main controller used in the official ROS education platform...
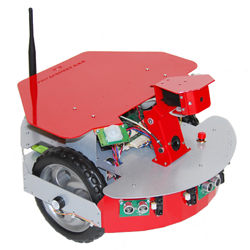
X-80
X80 is now available in four colors: Orange, Green, Blue and Red. This ready to use mobile robot platform is designed for researchers developing advanced robot applications such as remote monitoring, telepresence and autonomous navigation/patrol. Mechanics The X80 is the result of extensive efforts to develop a robot that would...
