-

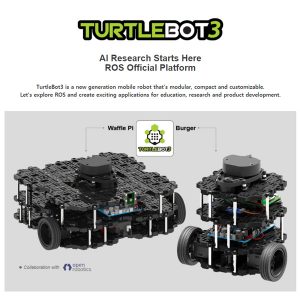
TURTLEBOT 3 Waffle Pi
Qty: 1$13,800.00 -

Li-ion Battery 3.7V 1300mAh LB-041
Qty: 1$250.00
Total:
$14,050.00
Total:
$14,050.00


A premium designed, video-oriented, autonomous personal AI assistant robot. temi can recognise and follow when requested, save preset locations, and navigate flawlessly around your home and office while connecting you to your friends, family and favorite web services.

Robotis Engineer Kit2 require components form the Robotis Engineer Kit1 in order to assemble the example robots.

Unitree G1-Universal humanoid robot - Edu Standard Version

Lead Time : 1 Week Feature This product is a compact version of OpenManipulator based on ROS. It has a high payload as DYNAMIXEL XM-430 model is applied. Easy to use with PC or mobile platform such as TB3 Waffle Pi. Provides source code and development environment which helps you...

XM540-W270-R The DYNAMIXEL X-Series is a new line-up of high performance networked actuators. For more detailed information, please visit the DYNAMIXEL X-Series Product Information page. ■ Basic Features Improved Torque, Compact Design •Enhanced Durability and Expandability • Hollow Back Case Minimizes Cable Stress (3-Way Wiring) • Frames Directly Screwed onto the Case (No Nuts Needed) • Improved Aluminum...

[902-0130-000] XH430-V210-R ■ Basic Features The DYNAMIXEL X-Series is a new line-up of high performance networked actuators. For more detailed information, please visit the DYNAMIXEL X-Series Product Information page. • Improved Torque, Compact Design • Enhanced Durability and Expandability • Hollow Back Case Minimizes Cable Stress (3-Way Wiring) • Frames Directly Screwed onto the Case (No Nuts...
[902-0127-000] XH430-W210-T ■ Basic Features The DYNAMIXEL X-Series is a new line-up of high performance networked actuators. For more detailed information, please visit the DYNAMIXEL X-Series Product Information page. • Improved Torque, Compact Design • Enhanced Durability and Expandability • Hollow Back Case Minimizes Cable Stress (3-Way Wiring) • Frames Directly Screwed onto the Case (No Nuts Needed)...

[902-0132-000] U2D2 ■ Basic Features U2D2 is a small size USB communication converter that enables to control and to operate the DYNAMIXEL with the PC. It is smaller than the previous model and has mount holes to make it easier to install on robots. It uses the USB cable to connect to...

■ Hyperlinks Click here to download RoboPlus Design to see the 3D assembly manual.

[902-0064-000] MX-28R **Caution – MX-28R supports RS-485 communication. – Recommended voltage of MX-28 is different with that of former RX-28. – Operating Voltage : 10~14.8V (Recommended Voltage: 12V) DESCRIPTION: DYNAMIXEL is a robot exclusive smart actuator with fully integrated DC Motor + Reduction Gearhead + Controller + Driver + Network in one...
Robotis Engineer Kit2 require components form the Robotis Engineer Kit1 in order to assemble the example robots.

Features This LiPo battery is intended for robots. PCM is incorporated to protect the battery from overcharge, discharge, and excessive current. Can be recharged with LBC-010 Battery Charger. Package Components LIPO 11.1V Battery LB-010 1 Battery Cover-T 1 FP04-F60 1 Battery Extension Cable 1 * Battery Charger (LBC-010) sold separately...

[902-0044-001] AX-18A 6pcs Bulk ** DESCRIPTION AX-18A is a newer version of the AX-18F with the same performance, but more advanced external design. It is 100% compatible with former AX-18F at 1:1 scale, with the same control method. ** CHARACTERISTICS – This is a bulk package product consited with 6 pcs of actuators only without accessories at cheaper...